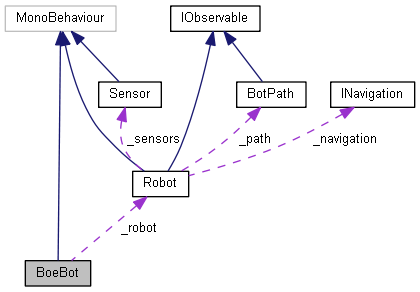
BoeBot differential drive control system. Built using data from: https://www.parallax.com/product/900-00008 See final report for diagram of implementation
More...
|
| float | maxWheelRpm = 50f |
| | The max wheel RPM (50RPM for parallax continuous rotation servo) More...
|
| |
| float | maxWheelTorque = 0.268f |
| | The max wheel torque (0.268NM for parallax continuous rotation servo). More...
|
| |
| float | Kp = 0.5f |
| | Control system gain parameter. More...
|
| |
BoeBot differential drive control system. Built using data from: https://www.parallax.com/product/900-00008 See final report for diagram of implementation
Definition at line 10 of file BoeBot.cs.
Definition at line 48 of file BoeBot.cs.
49 _robot = GetComponent<Robot>();
50 _leftWheel = transform.Find(
"Left Wheel").GetComponent<WheelCollider>();
51 _rightWheel = transform.Find(
"Right Wheel").GetComponent<WheelCollider>();
WheelCollider _rightWheel
Definition at line 54 of file BoeBot.cs.
65 Debug.DrawRay(transform.position, target, Color.green);
67 if(target.magnitude < 0.1f) {
74 rightAngle = Vector3.Angle(target, transform.right);
87 Debug.DrawRay(
_leftWheel.transform.position, transform.forward *
leftTarget * 0.1f, Color.magenta);
float maxWheelRpm
The max wheel RPM (50RPM for parallax continuous rotation servo)
Vector3 navigationCommand
The cached navigation bearing from INavigation.
bool moveEnabled
A flag indicating whether the robot should try moving.
float Kp
Control system gain parameter.
WheelCollider _rightWheel
float maxWheelTorque
The max wheel torque (0.268NM for parallax continuous rotation servo).
| WheelCollider BoeBot._leftWheel |
|
private |
| WheelCollider BoeBot._rightWheel |
|
private |
| float BoeBot.forwardAngle |
|
private |
Control system gain parameter.
Definition at line 27 of file BoeBot.cs.
| float BoeBot.maxWheelRpm = 50f |
The max wheel RPM (50RPM for parallax continuous rotation servo)
Definition at line 17 of file BoeBot.cs.
| float BoeBot.maxWheelTorque = 0.268f |
The max wheel torque (0.268NM for parallax continuous rotation servo).
Definition at line 22 of file BoeBot.cs.
The documentation for this class was generated from the following file:

 1.8.9.1
1.8.9.1 
