 |
BotNavSim
v0.4.3
Mobile Robot Simulation
|
AR Drone control system implementation. Developed with data from http://parrotcontact.emencia.net/website/user-guides/download-user-guides.php?pdf=ar-drone-2/AR-Drone-2_User-guide_Android_UK.pdf See final report for diagram of implementation. More...
Public Attributes | |
| float | maxLateralSpeed |
| The maximum lateral speed allowed by the control system. More... | |
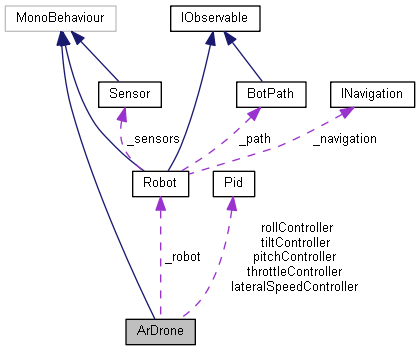
| Pid | lateralSpeedController |
| The lateral speed controller. More... | |
| Pid | tiltController |
| The tilt controller. More... | |
| float | verticalSpeed |
| The maximum speed that the vertical target location can change. More... | |
| float | maxThrottle |
| The max throttle of each propeller force. More... | |
| Pid | throttleController |
| The throttle controller. More... | |
| float | maxTilt |
| The maximum roll and pitch permitted by the control system. (measured in degrees) More... | |
| bool | rotateYaw |
If true then AR Drone will rotate to face the command direction vector. More... | |
| float | maxYawVelocity |
| The max yaw rotational velocity. (measured in degrees per second) More... | |
| float | yawKp |
| Gain parameter in controlling the yaw torque. More... | |
| Pid | rollController |
| The roll controller. More... | |
| Pid | pitchController |
| The pitch controller. More... | |
| Transform | FL |
| Reference to the front-left propeller position. More... | |
| Transform | FR |
| Reference to the front-right propeller position. More... | |
| Transform | BL |
| Reference to the back-left propeller position. More... | |
| Transform | BR |
| Reference to the back-right propeller position. More... | |
Private Member Functions | |
| void | Awake () |
| Awake this instance. More... | |
| void | Start () |
| Start this instance. More... | |
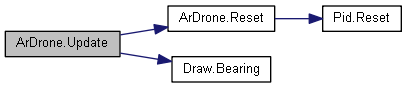
| void | Reset () |
| Reset the PID controllers. More... | |
| void | Update () |
| void | FixedUpdate () |
Private Attributes | |
| float | _actualPitch |
| float | _actualRoll |
| float | _targetSpeed |
| float | _targetTilt |
| float | _targetRoll |
| float | _targetPitch |
| float | _targetHeight |
| Robot | _robot |
| Vector3 | _command |
| Vector3 | _target2d |
| Vector3 | _holdRotation |
| Vector3 | _holdPosition |
| Vector3 | _controlTorque |
| Vector3 | _flControlThrust |
| Vector3 | _frControlThrust |
| Vector3 | _blControlThrust |
| Vector3 | _brControlThrust |
AR Drone control system implementation. Developed with data from http://parrotcontact.emencia.net/website/user-guides/download-user-guides.php?pdf=ar-drone-2/AR-Drone-2_User-guide_Android_UK.pdf See final report for diagram of implementation.
Definition at line 10 of file ArDrone.cs.
|
private |
|
private |
Definition at line 223 of file ArDrone.cs.

|
private |
Reset the PID controllers.
Definition at line 137 of file ArDrone.cs.


|
private |
|
private |
Definition at line 146 of file ArDrone.cs.
|
private |
Definition at line 96 of file ArDrone.cs.
|
private |
Definition at line 97 of file ArDrone.cs.
|
private |
Definition at line 116 of file ArDrone.cs.
|
private |
Definition at line 117 of file ArDrone.cs.
|
private |
Definition at line 107 of file ArDrone.cs.
|
private |
Definition at line 113 of file ArDrone.cs.
|
private |
Definition at line 114 of file ArDrone.cs.
|
private |
Definition at line 115 of file ArDrone.cs.
|
private |
Definition at line 110 of file ArDrone.cs.
|
private |
Definition at line 109 of file ArDrone.cs.
|
private |
Definition at line 105 of file ArDrone.cs.
|
private |
Definition at line 108 of file ArDrone.cs.
|
private |
Definition at line 103 of file ArDrone.cs.
|
private |
Definition at line 102 of file ArDrone.cs.
|
private |
Definition at line 101 of file ArDrone.cs.
|
private |
Definition at line 99 of file ArDrone.cs.
|
private |
Definition at line 100 of file ArDrone.cs.
| Transform ArDrone.BL |
Reference to the back-left propeller position.
Definition at line 89 of file ArDrone.cs.
| Transform ArDrone.BR |
Reference to the back-right propeller position.
Definition at line 94 of file ArDrone.cs.
| Transform ArDrone.FL |
Reference to the front-left propeller position.
Definition at line 79 of file ArDrone.cs.
| Transform ArDrone.FR |
Reference to the front-right propeller position.
Definition at line 84 of file ArDrone.cs.
| Pid ArDrone.lateralSpeedController |
The lateral speed controller.
Definition at line 23 of file ArDrone.cs.
| float ArDrone.maxLateralSpeed |
The maximum lateral speed allowed by the control system.
Definition at line 18 of file ArDrone.cs.
| float ArDrone.maxThrottle |
The max throttle of each propeller force.
Definition at line 38 of file ArDrone.cs.
| float ArDrone.maxTilt |
The maximum roll and pitch permitted by the control system. (measured in degrees)
Definition at line 49 of file ArDrone.cs.
| float ArDrone.maxYawVelocity |
The max yaw rotational velocity. (measured in degrees per second)
Definition at line 60 of file ArDrone.cs.
| Pid ArDrone.pitchController |
The pitch controller.
Definition at line 74 of file ArDrone.cs.
| Pid ArDrone.rollController |
The roll controller.
Definition at line 70 of file ArDrone.cs.
| bool ArDrone.rotateYaw |
If true then AR Drone will rotate to face the command direction vector.
Definition at line 54 of file ArDrone.cs.
| Pid ArDrone.throttleController |
The throttle controller.
Definition at line 43 of file ArDrone.cs.
| Pid ArDrone.tiltController |
The tilt controller.
Definition at line 28 of file ArDrone.cs.
| float ArDrone.verticalSpeed |
The maximum speed that the vertical target location can change.
Definition at line 33 of file ArDrone.cs.
| float ArDrone.yawKp |
Gain parameter in controlling the yaw torque.
Definition at line 65 of file ArDrone.cs.
 1.8.9.1
1.8.9.1 
